import torch import academic_core as academic metrics = academic.load_bibliography('shaffer_cv_2026') print(Successfully indexed publications and patents ([3, 6]))
Google Scholar
Citation profile and publication index.
Selected Publications
Pos3R: 6D Pose Estimation for Unseen Objects Made Easy
CVPR 2025 // 2025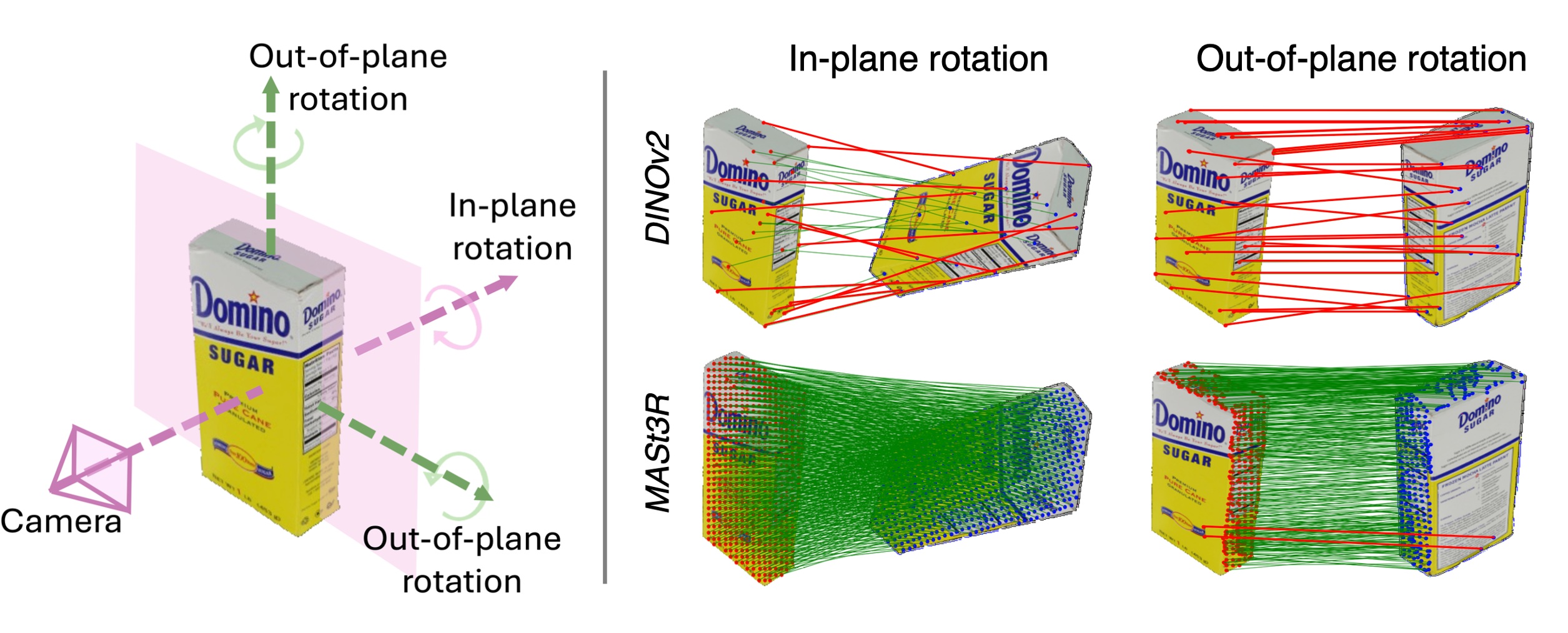
A method for estimating the 6D pose of any object from a single RGB image, making extensive use of a 3D reconstruction foundation model and requiring no additional training.
Differentiable Neural Surface Refinement (TNSR)
CVPR 2024 // 2024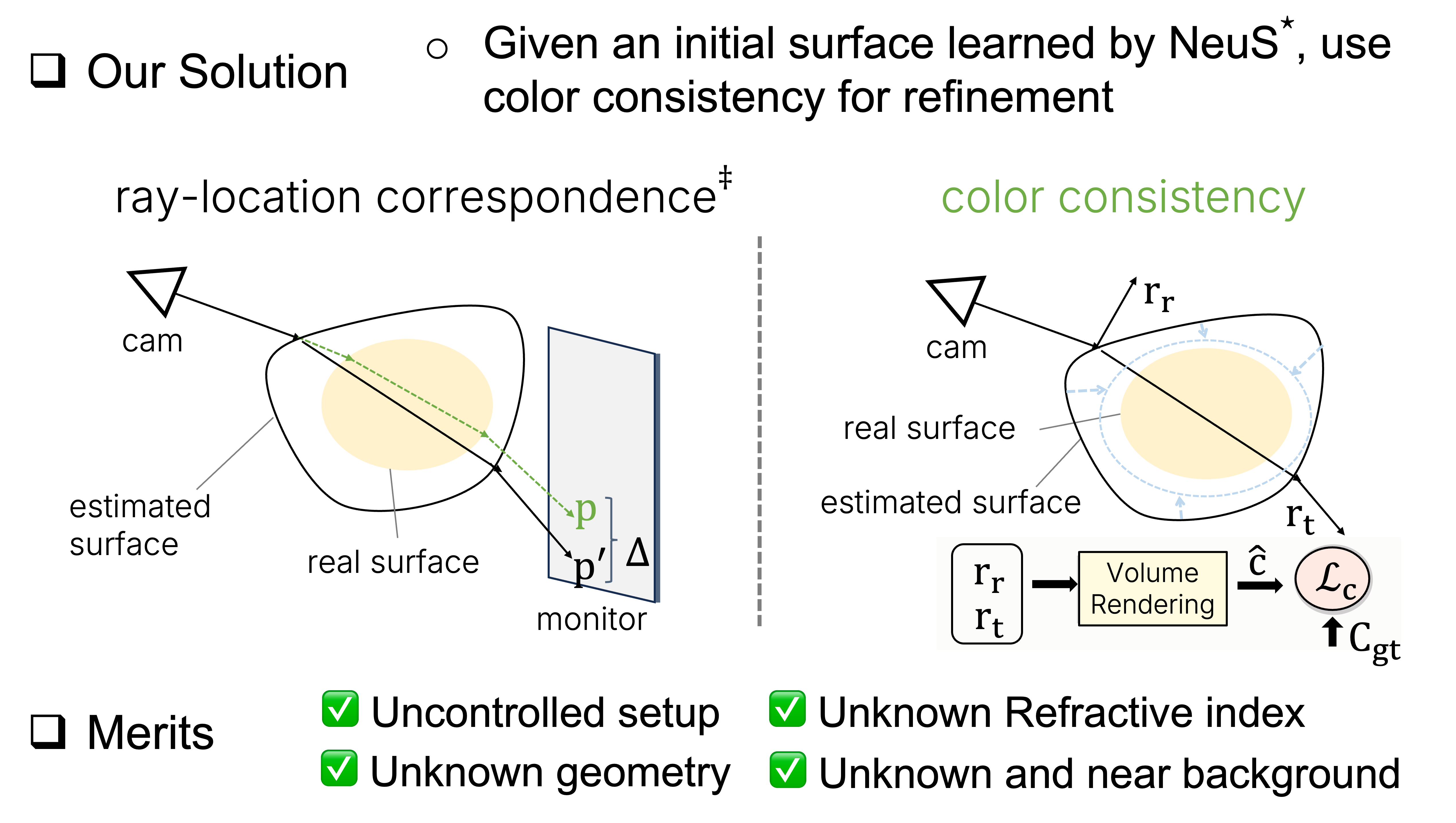
Introduces transparent neural surface refinement explicitly incorporating physical refraction and reflection tracing.
Ray Deformation Networks
WACV 2024 // 2024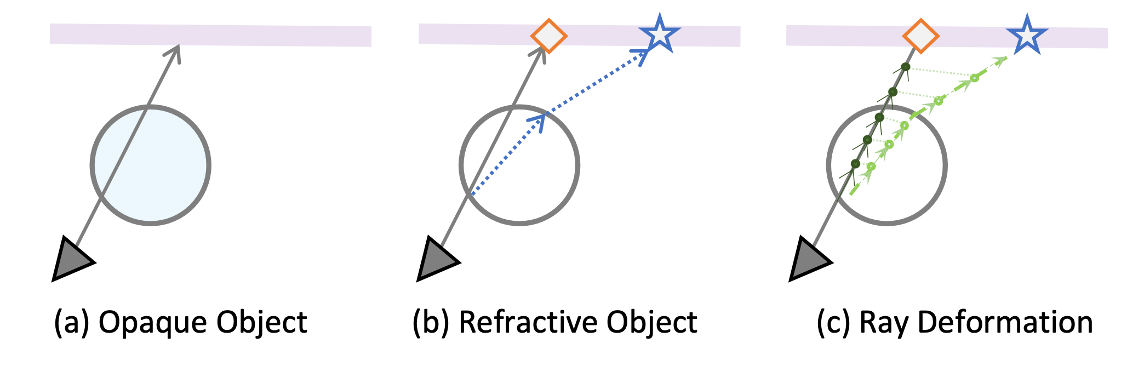
Deformable networks to learn tailored deformation fields for refractive objects in NeRF frameworks.
Patents
Selected Publications & Patents
Google Scholar
Citation profile and publication index.
Proposed a novel architecture for synthesizing views of refractive objects, outperforming standard NeRF baselines in transparent media scenarios.
Tactile Sensor Arrays for Robotic Grasping
Patent US-11234567Designed high-resolution tactile skin for industrial grippers, enabling slip detection and material classification in real-time control loops.
Causal Reasoning in Unstructured Environments
ArXiv PreprintA framework for counterfactual reasoning in robotic manipulation tasks, reducing sample complexity in reinforcement learning deployments.